近日,80足球直播吧张文明教授团队与同济大学航空航天与力学学院李汶柏研究员合作研究,在Nature Communications上发表“Self-vectoring electromagnetic soft robots with high operational dimensionality”文章,提出了一种自矢量电磁软体机器人的新概念,构筑了完整的基于内嵌微流道弹性体和可重构液态金属线圈的软电磁驱动器实施方案,发展了基于洛伦兹力和矢量合成原理的高维度驱控的新方法,实现了软电磁机器人中任意子域模块的即时主动和可选择性驱控,解决了通过有限数量驱动器实现软体机器人的高效可重编程高维变形,以及多模式运动、转换的难题,为开发媲美自然界生物体的高灵活度和高集成度的软体机器人系统提供了更多可能性。上海交通大学博士生陈虎越、同济大学李汶柏研究员为共同第一作者,张文明教授和李汶柏研究员为共同通讯作者。
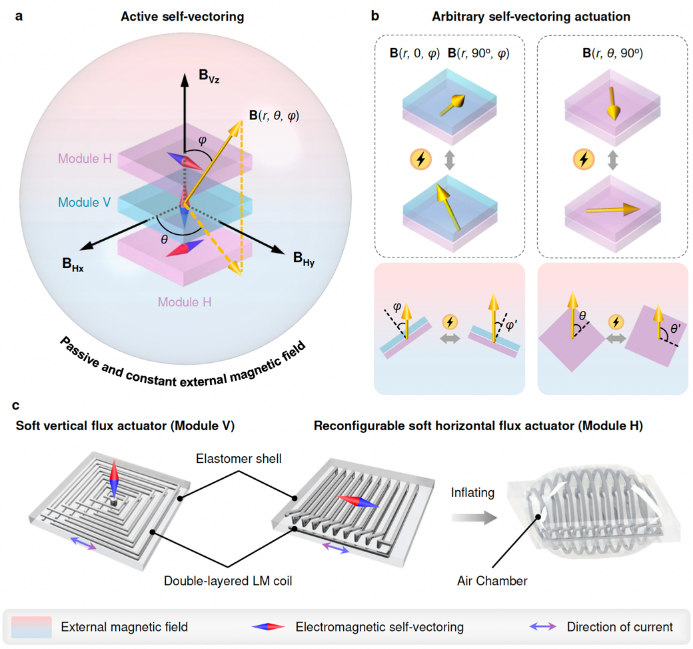
图1 主动自矢量软体电磁驱动模块设计和静磁场下的自矢量高维驱控原理
受生物系统启发的软机器人具有卓越的灵活性、适应性和安全性,在搜索救援、野外探索、人机交互和生物医学应用方面显示出巨大潜力。软材料和结构在理论上能赋予传统刚性机器人难以企及的无限自由度和灵活性,然而实际实施中受限于驱动机理和结构设计,更丰富的变形和更灵巧的运动,不可避免地需要更多数量的软驱动器和庞大复杂的控制系统。尽管相关学者已经开发出了流体驱动、电驱动、磁驱动、光驱动等多种软驱动器,但它们在软体机器人系统中的集成水平和驱动能力仍然与生物系统相差甚远。近些年通过嵌入预编程的磁性颗粒构筑的小尺度磁控软体机器人,展现出了更佳的灵活性和操控性。然而,无论是通过永磁铁、电磁铁,或者亥姆霍兹线圈控制外磁场进行的操控,在控制系统构成和操纵实施上都操作复杂、成本高昂,且现有的磁软体机器人的加热式重新编程方法速度慢、耗能高、无法实现原位定制。如何通过有限数量的驱动器和简易的控制方案,实现软体机器人的高效高维可重编程驱控目前仍然面临较大的挑战。
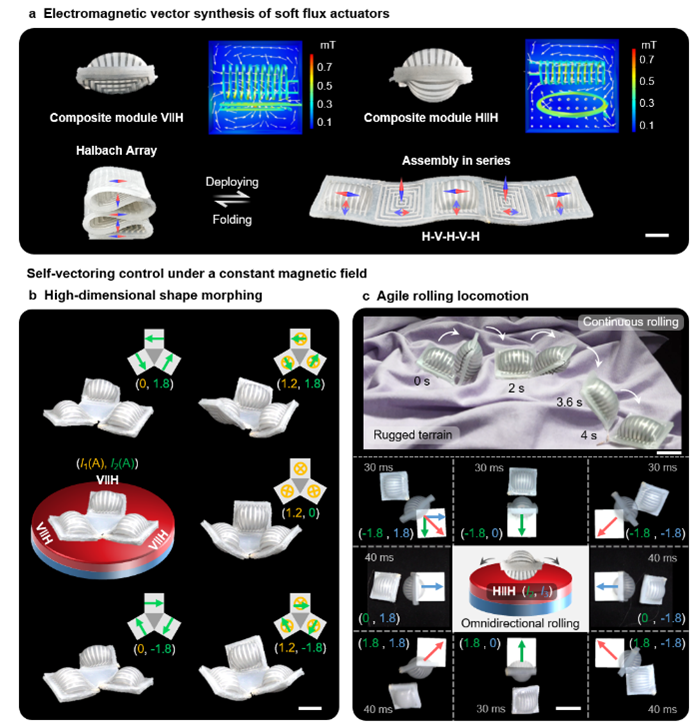
图2 自矢量驱控实现的高维可重编程形状变形和敏捷滚动运动
研究团队利用嵌入的液态金属制造出可重构的两类典型的软电磁线圈,即具有垂直电磁矢量的平面螺旋线圈和具有水平电磁矢量的三维可重构螺线管线圈。通过不同重构策略将两类基本模块复合叠加,实现了三维空间内任意方向的矢量合成。模块化的“自矢量机器人”通过简单的电流控制即可实现即时高效的可重新编程、独立的子域驱动和全方向的矢量操控,通过最少数量的驱动器展示了更高维度的变形和运动。研究分别实现了单驱动器和单路控制信号的适应复杂地形的连续翻滚和双向翻滚运动,以及两个驱动器和两路控制信号控制的全向翻滚运动和平面全向定位操控;展示了无需复杂多源控制和辅助设备,而仅通过两路电流信号控制的高维可重编程形状变形;另外实现了仿蠕虫的双向爬行和转向,以及翻滚、全向爬行及原位旋转等运动,并且展示了集成控制系统的无拖缆水面游动和自带磁铁的水下游动。“自矢量”策略将为人机交互、医疗应用、主动超材料等领域带来新的启发。
该研究工作得到了国家自然科学基金,上海市“科技创新行动计划”,上海市扬帆计划和同济大学中央高校基础研究项目的资助。
