近日,80足球直播吧重大装备设计与控制工程研究所郭为忠教授团队在国际机构学期刊Mechanism and Machine Theory上发表了题为“Synthesis and cross-section design of a new family of single-loop 7R deployable polygon mechanisms”的研究论文。该团队首次提出了单环7R可展开多边形机构,建立了系统的设计方法,为具有一般展开轮廓和网络划分的大型可动结构设计提供了可能,为航空航天、机械超材料、艺术建筑等领域的复杂展开功能与空间优化提供了新技术途径。重大装备设计与控制工程研究所2022级致远荣誉计划博士研究生陈昊为论文第一作者,郭为忠教授为通讯作者。
可展开多边形机构(DGM)是未来空间可展开系统发展的一种重要形式,因能够折叠成紧凑的束状又能展开成平面多边形的几何形态,具有重要的应用前景。论文首次提出单环7R类型的可展开多边形机构,并将其设计问题分解为获得理论机构解的原理图综合和获得物理结构解的截面结构设计两个子问题,系统建立了设计方法。
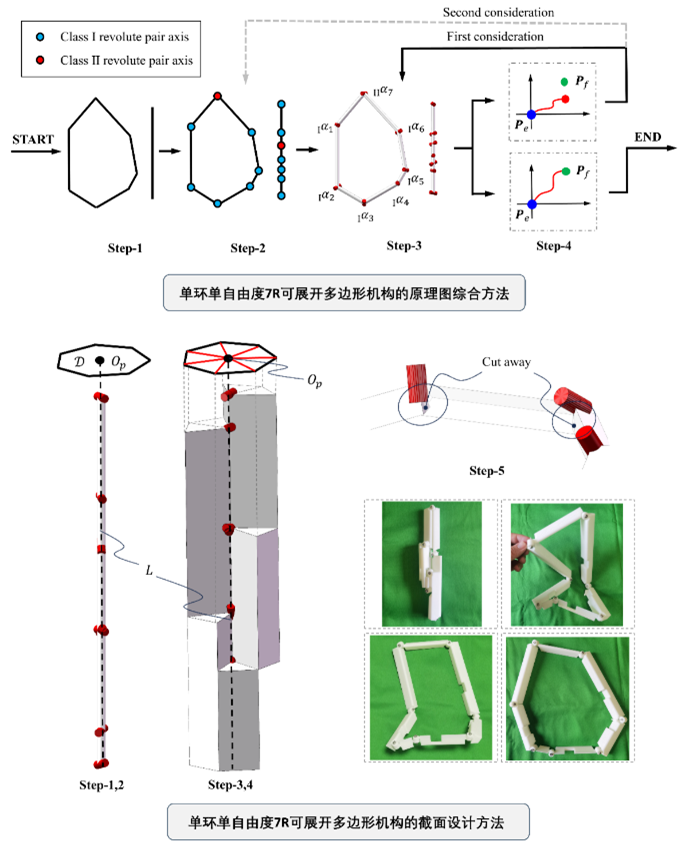
针对获得理论机构解的原理图综合子问题,研究团队讨论了构建DGM过程中的两类转动副轴线布局及其取值范围,并定义了构建DGM的三类参数。为了设计出具有任意期望的可展开多边形形态的单环单自由度DGM,该团队首次提出利用DGM的不同状态完成不同种类参数的设计,给出了每类参数设计过程中所需要的全部约束条件及其几何含义,并使用预测校正方法实现了在隐式定义的构型空间中的路径搜索问题,从而形成能够设计所有单环单自由度7R DGM的原理图综合方法。团队提出的利用DGM不同状态完成不同种类参数设计的设想,能够拓展至其他类型DGM的原理图设计。
针对获得物理结构解的截面结构设计子问题,该团队结合单环机构的闭环约束要求提出了一种新方法,计入各杆件实际尺寸对DGM可折叠性的影响,在物理结构层面上对7R DGM原理方案作进一步细化,确保设计完成的7R DGM装置能顺利实现无干涉的束状折叠和展开。利用该方法,可以设计出具有所需横截面几何形态的7R DGM。
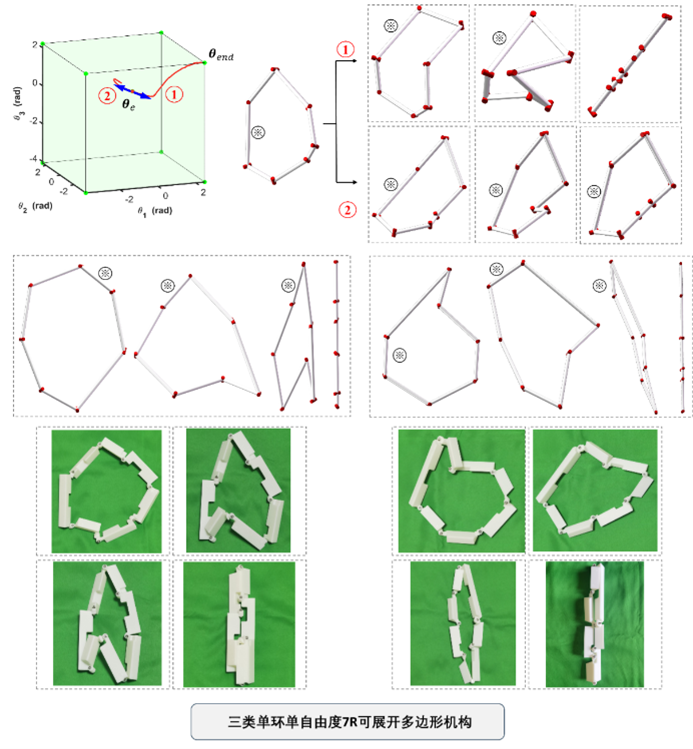
该论文首次提出无过约束的7R DGM新系列,填补了单环单自由度无过约束DGM领域的空白。论文系统建立了设计方法,能够有效处理边数不超过7的任意多边形的空间可展开机构的设计问题。这一研究成果为未来构造任意复杂几何形态的大型空间可展开结构,提供了多样化的基本单元,极大丰富了大型空间可展开结构的网格划分路径,在航空航天、机械超材料、艺术建筑和土木工程等领域具有广泛的应用前景。
该团队近期在可展开机构领域取得了系列研究进展,先后提出了平面对称6R DGM和一般7R DGM的综合方法,发明了系列新型可展开多边形/多面体机构。对于可展开多面体机构,该团队提出了一种新的RRR支链来链接各可展开单元,建立了多面体展开图法和最少关节角法,可以实现具有最少的关节、连杆和自由度的可展开多面体机构设计。
Mechanism and Machine Theory创刊于1970年,是国际机构与机器科学联合会(IFToMM)会刊,专注于发布机构与机器科学领域的高质量研究论文,在国际机构与机器科学领域享有盛誉。
郭为忠教授团队致力于解决现代机构学与并联机器人领域的前沿基础科学问题及关键技术,旨在通过基础理论突破,带动航空航天等重大工程应用领域的装备创新发展。近年来在Mechanism and Machine Theory、ASME Transactions-Journal of Mechanisms and Robotics、ASME Transactions-Journal of Mechanical Design等期刊上发表了30余篇论文。
论文链接:
https://www.sciencedirect.com/science/article/pii/S0094114X24000806
