

基于定位引导的机器人虚拟现实技术及应用
机械工程资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
企业导师: 袁鑫

指导教师: 庄春刚
项目成员: 韩鸣洲 沈之楷 谢沛远
 项目海报
项目海报


 项目视频
项目视频
 项目简介
项目简介
项目概述
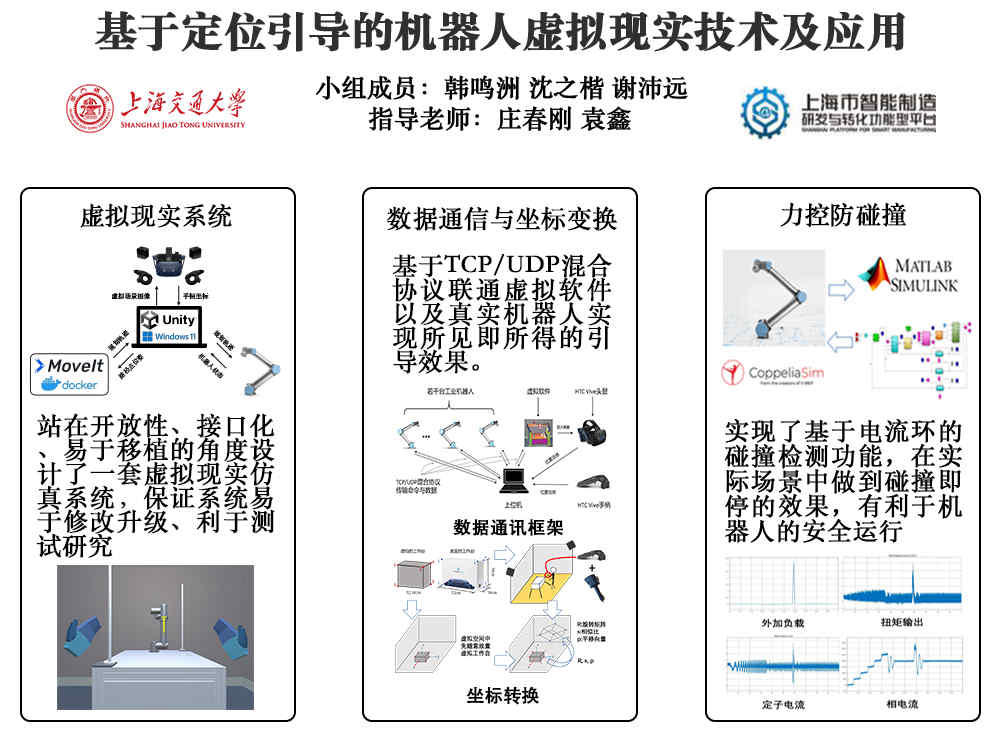
制造业中,工业机器人在面对焊接、上下料和装配等典型工业场景时,常需要技术人员针对具体情况对机器人进行重新示教和编程。这种情况下,换型时间长,操作复杂,效率低下,对工人技术要求也较高。因此,工业界需要开发一种新型的定位与引导方式实现简单、高效、柔性的智能引导操作。基于虚拟现实的定位引导技术精度高,成本低,操作简单,非常适合作为机器人定位与引导技术的新尝试。本课题中,我们计划将定位引导技术与机器人力控操作进行结合,开发简单易操作的机器人智能引导系统,同时开发基于关节电流的机器人防碰撞监控功能,实现机器人工作站的智能引导,点位定位,轨迹复现与简单装配动作实现。
项目目标
本课题中,我们计划基于unity3D搭建虚拟现实仿真系统,使用Docker container配置MoveIt和URSim需要的环境,分别进行路径规划与数据通信测试。同时,开发数据分析与解耦算法将操作端的位置与位姿与真实机器人的坐标位姿进行双向联接,实现虚拟系统与真实机器人工作站的双向控制,开发简单软件界面与坐标位姿匹配算法,用于实时显示机器人工作站实时状态并进行简单指令操作。此外,我们还计划开发基于机器人关节电流的力控安全防碰撞功能,用于智能引导在实际工业场景如焊接焊缝识别、装配动作等进行应用时提供简单的人机共融能力,为智能引导系统在典型应用中的柔性化提供助力。
项目成果
本项目站在开放性、接口化、易于移植的角度设计了一套虚拟现实仿真系统,保证系统易于修改升级、利于测试研究。并利用虚拟现实软件联通了虚拟系统与真实机器人系统,并将其利用与工业场景,实现简单高效的机器人作业。同时实现了基于电流环监测的力控防碰撞功能,在实现功能的同时没有涉及复杂的理论计算,通过VREP-MATLAB进行了联合仿真测试。但由于本学期条件的影响,本项目目前还需要在实机上进行进一步的测试,从精确度的方面对系统做出进一步的调试或者设计上的改进。




