

基于ROS2的智能小车开发
机械工程资助企业: 弗祐机器人科技(上海)有限公司
企业导师: 邵云龙

指导教师: 黄宏成
项目成员: 王金杰 曹勋
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
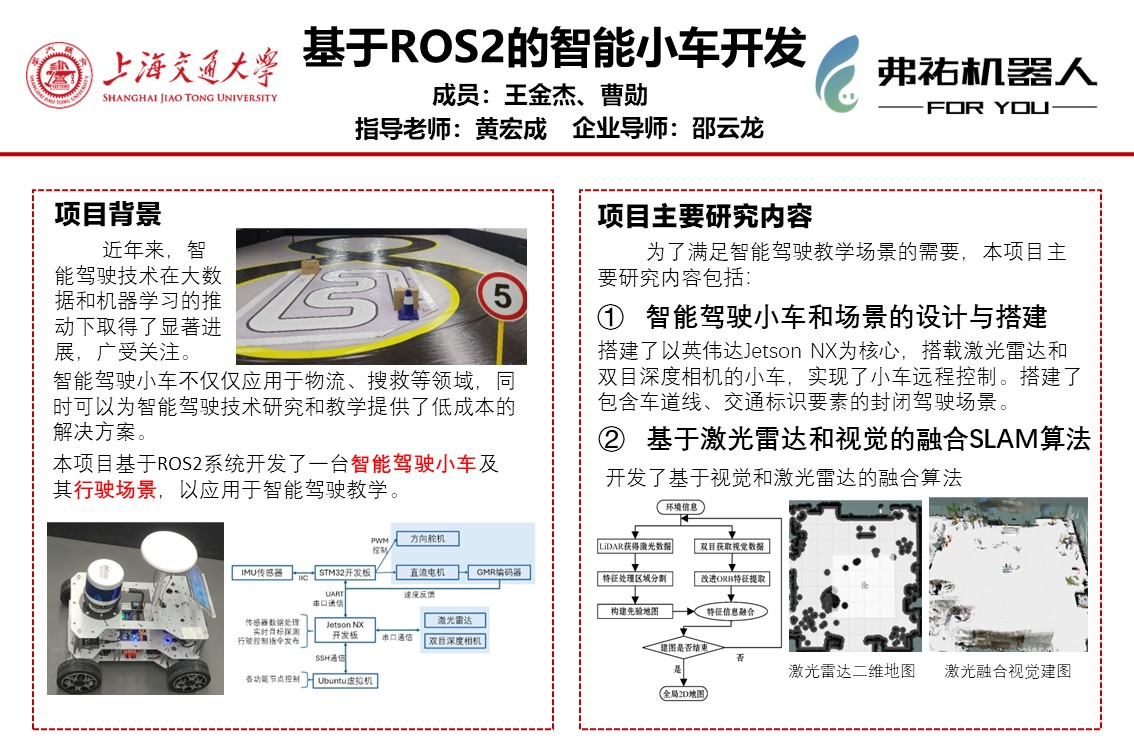
智能驾驶技术是当今汽车行业的前沿领域,其在提高交通安全、减少交通拥堵、改善驾驶体验等方面具有重要意义。而搭载深度相机、激光雷达等传感器的智能驾驶小车所包含的技术与真实道路场景下的自动驾驶有着异曲同工之处,其对于融合SLAM算法、交通标志探测、车道线识别等方面的研究都能够对智能驾驶技术的研究有所启发。本项目旨在开发一款基于ROS2的智能小车及其行驶环境,通过集成各种传感器和执行器,实现环境感知、自主行驶和导航,以供智能驾驶教学使用。
项目目标
通过集成各种传感器和执行器,小车能够感知周围环境并做出相应的决策和行动。期望结果包括以下几个方面:
自主导航能力:小车能够根据预设的路径或实时规划的路径进行自主导航,包括前进、后退、转弯等基本动作。
避障能力:小车能够通过感知传感器检测到周围的障碍物,并采取相应的避障策略,如改变方向、减速等,以避免与障碍物碰撞。
多传感器融合能力:小车能够将多种传感器的数据进行融合,提高对环境的感知精度和稳定性,从而更好地完成任务。
环境感知能力:小车能够实时探测环境内的交通标识,并根据探测结果做出反馈。
项目成果
项目设计并搭建了一台基于ROS2系统的,配备激光雷达和深度相机的智能小车,搭建了包含车道线、交通表示等要素的行驶环境
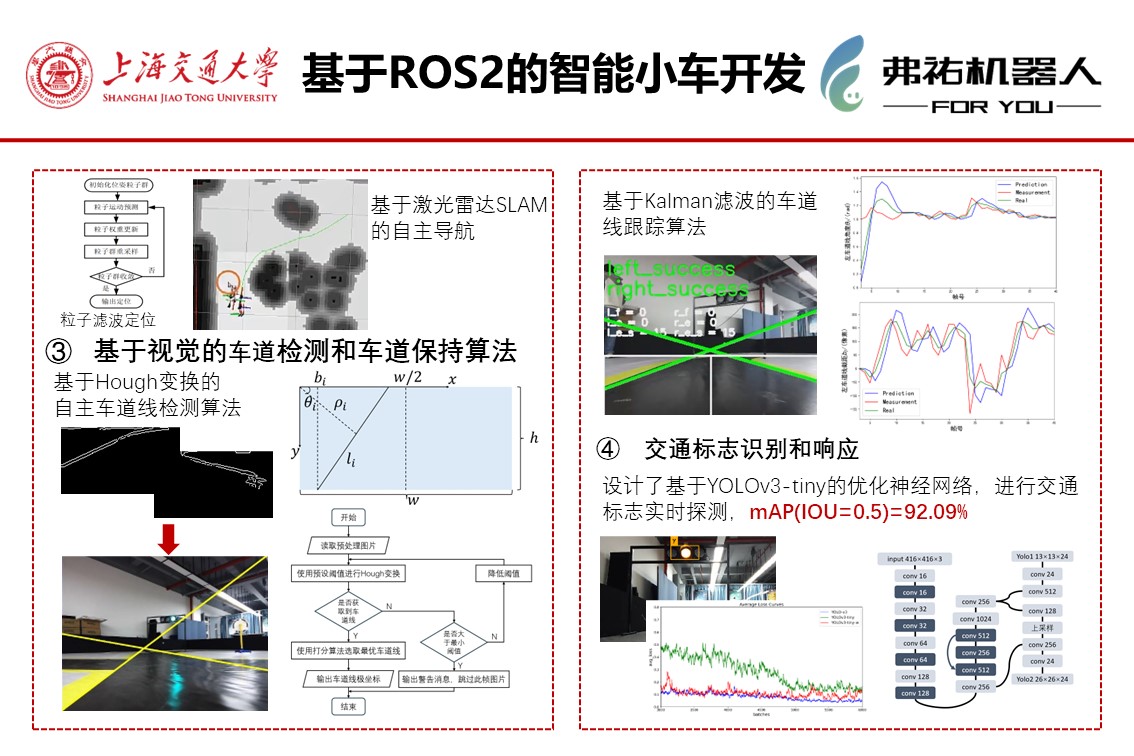
开发了激光雷达和视觉融合的SLAM算法:实现了激光雷达视觉融合建图,实现了小车粒子滤波定位,实现了基于激光雷达的自主导航。
开发了基于Hough变换和Kalman滤波的车道线跟踪算法,实现了小车巡线行驶。设计了优化的YOLOv3-tiny目标探测模型,实现了交通标志实时探测和小车响应算法。




