

考虑主客观感知评估的智能驾驶人机共驾方法研究
机械工程资助企业:
 上海人工智能研究院有限公司
上海人工智能研究院有限公司
企业导师: 王资凯

指导教师: 胡川
项目成员: 杨晨昊 马凌 李博文 余晨曦
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
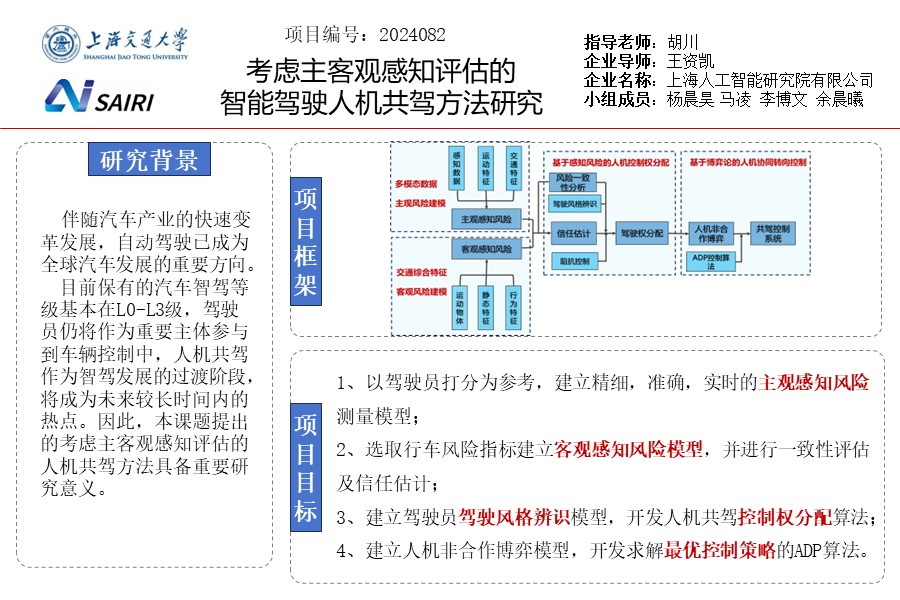
伴随汽车产业的快速变革发展,自动驾驶已成为全球汽车发展的重要方向。目前保有的汽车智驾等级基本在L0-L3级,驾驶员仍将作为重要主体参与到车辆控制中,人机共驾作为智驾发展的过渡阶段,将成为未来较长时间内的热点。据此本项目设计了一套考虑主客观感知评估的人机共驾方法:构建了一个考虑主客观风险的信任估计模型,并在此模型的基础上设计人机控制权分配策略,最终基于博弈思想实现控制策略,形成一套完整的基于主客观风险的人机共驾协同控制方法,提升自动驾驶系统的安全性、可靠性。
项目目标
本项目拟建立一套考虑主客观感知评估的智能驾驶人机共驾系统,其中包含感知风险预测模型,考虑主客观风险一致性的信任估计模型,人机共驾控制权分配模型,人机协同转向控制算法部分,具体目标如下:
1、以驾驶员打分为参考,建立精细,准确,实时的主观感知风险测量模型;
2、选取行车风险指标建立客观感知风险模型,并进行一致性评估及信任估计
3、建立驾驶员驾驶风格辨识模型,开发人机共驾控制权分配算法。
4、建立人机非合作博弈模型,开发求解最优控制策略的ADP算法
项目成果
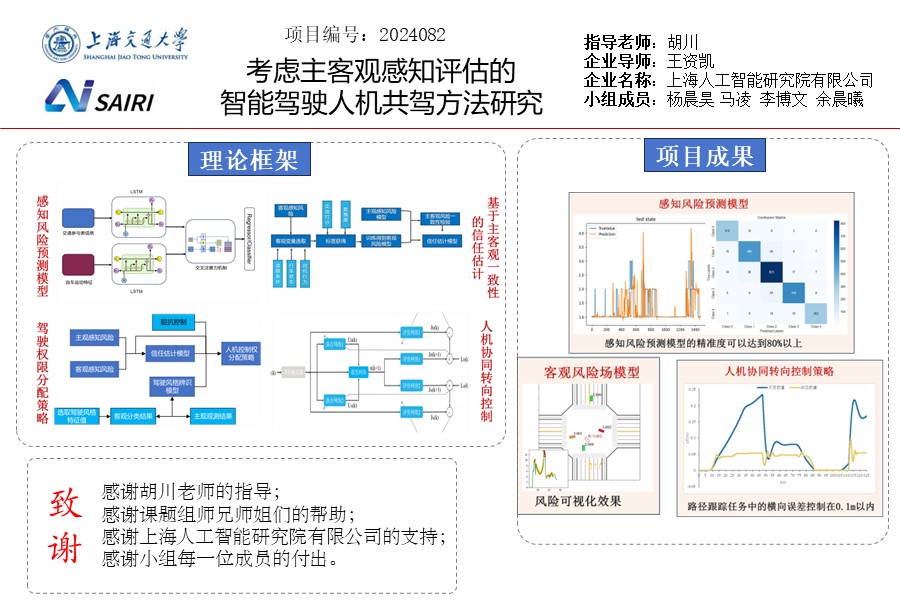
本项目成功设计了一套智能驾驶人机共驾系统,具体成果如下:
1、综合考虑主客观多模态数据,设计了一套基于LSTM的精准的感知风险预测模型,并设计了交互关系模块和个性化建模方法,最终的预测精准度达到80%以上;
2、构建多维度客观风险模型,加入行车轨迹预测模块,完成当天及未来时刻的风险预测。构建主客观风险一致性评价方法与主客观信任模型提升人机交互安全性及可靠性。
3、建立驾驶风格辨识模型,并结合感知风险和信任估计模型,基于强化学习的方式,得出实时的人机驾驶权重分配策略。
4、设计了人机非合作博弈框架,采用基于事件触发的自适应动态规划算法求解控制策略,并基于量化指标设计了动态权重分配策略,将路径跟踪任务中的横向误差控制在0.1m以内




