

空间自生长柔性变刚度机械臂
最具人气奖资助企业:
 湖南郎灵科技有限公司
湖南郎灵科技有限公司
企业导师: 邓志刚

指导教师: 张文明
项目成员: 房付熠,魏星宇,王叙宁
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
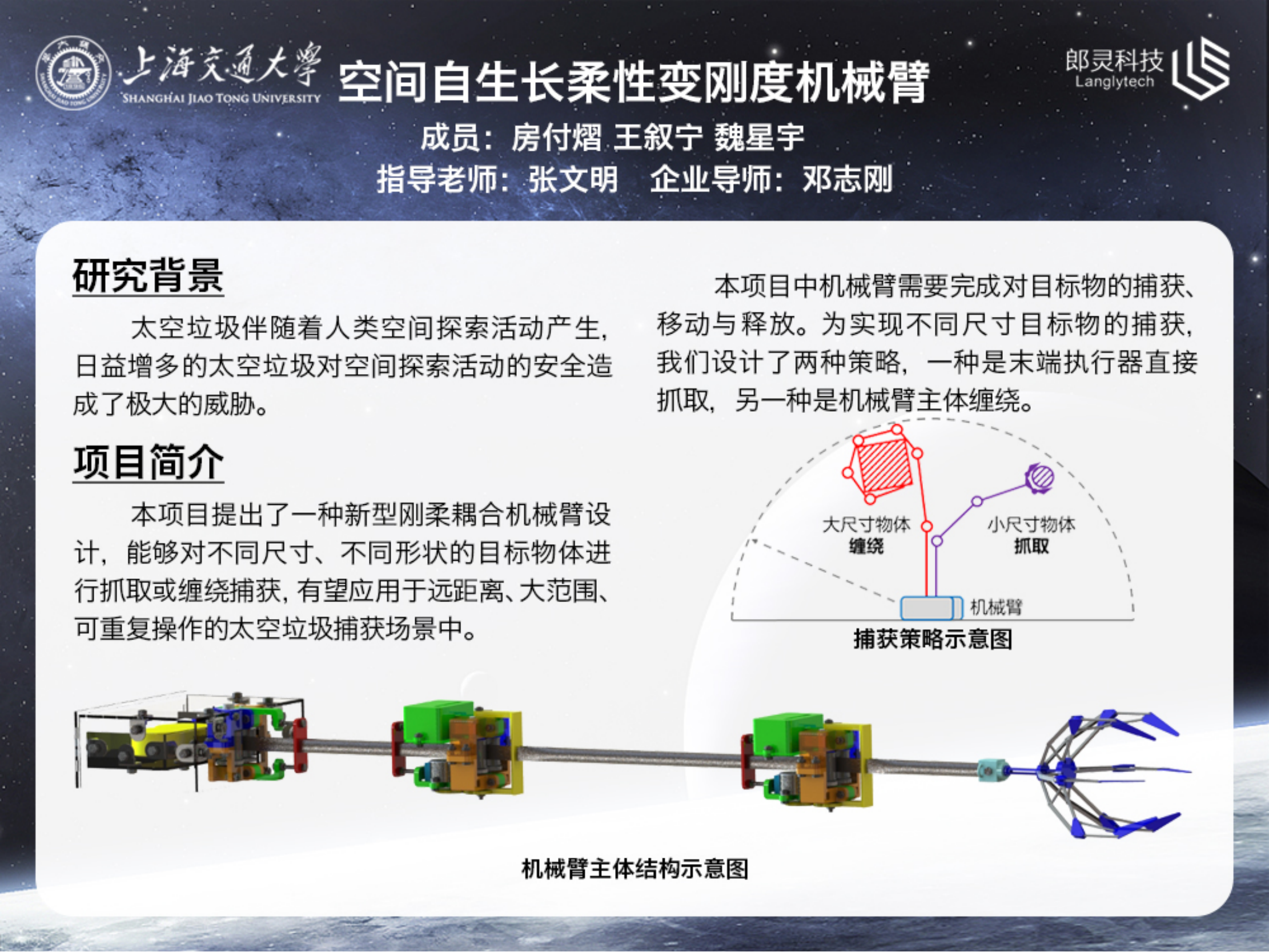
太空垃圾伴随着人类空间探索活动产生,日益增多的太空垃圾对人类太空探索活动的安全造成了极大的威胁。为此,太空垃圾清理成为亟需解决的世界性难题,如何实现多次可重复的目标转移以及自适应、跨尺寸的空间捕获,成为了本项目关注的重点。本项目提出了一种新型刚柔耦合机械臂设计,具有空间自生长、柔性变刚度等特征,能够对不同尺寸、不同形状的目标物体进行抓取或缠绕捕获,有望应用于远距离、大范围、可重复操作的太空垃圾捕获场景中。
项目目标
太空垃圾伴随着人类空间探索活动产生。废弃的航天器、碰撞或爆炸产生的碎片都可能成为太空垃圾的来源。由于太空垃圾处于在轨高速运动状态,即使体积较小的碎片也可能引发灾难性的后果。日益增多的太空垃圾对人类太空探索活动的安全造成了极大的威胁。为此,太空垃圾清除成为亟需解决的世界性难题。但现有清除方式,无法完美解决相关问题。因此,如何实现多次可重复的目标转移以及自适应、跨尺寸的空间捕获,成为了本项目的主要目标。
项目成果
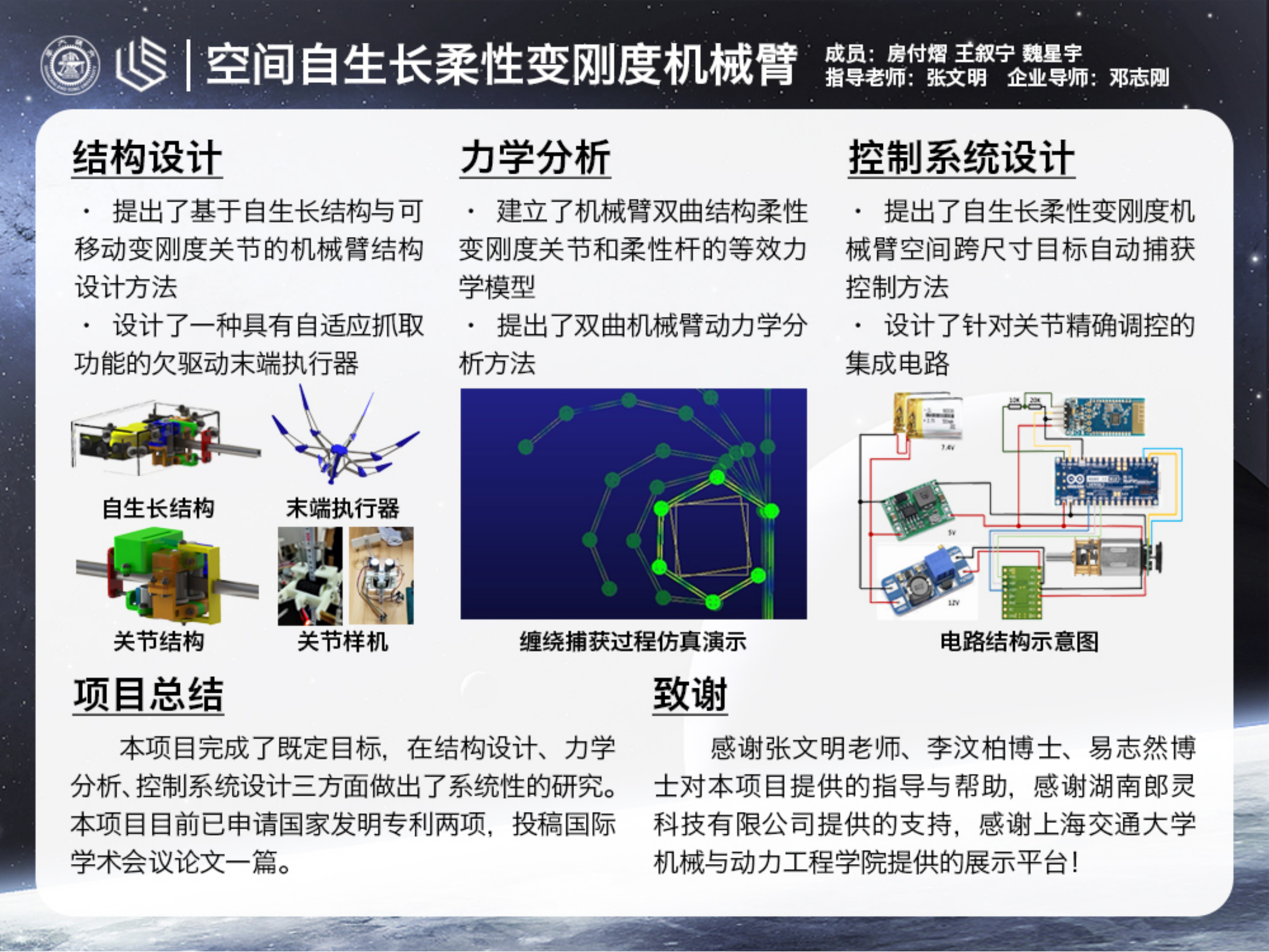
本项目提出了基于自生长结构与可移动变刚度关节的刚柔耦合机械臂结构设计方法,建立了机械臂柔性变刚度关节和柔性杆等效力学模型,提出了机械臂空间跨尺寸目标自动捕获控制方法。本项目提出的新型刚柔耦合机械臂设计具有空间自生长、柔性变刚度等特征,能够对不同尺寸、不同形状的目标物体进行抓取或缠绕捕获,有望应用于远距离、大范围、可重复操作的太空垃圾捕获场景中。本项目目前已申请国家发明专利两项,投稿国际学术会议论文一篇。




