

面向地下停车场的自动驾驶车辆定位与控制技术研究
最具人气奖资助企业:
 上海智能网联汽车技术中心有限公司
上海智能网联汽车技术中心有限公司
企业导师: 高恺岐

指导教师: 王亚飞
项目成员: 周铭涵、丁闻哲、张睿韬、王文韬
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
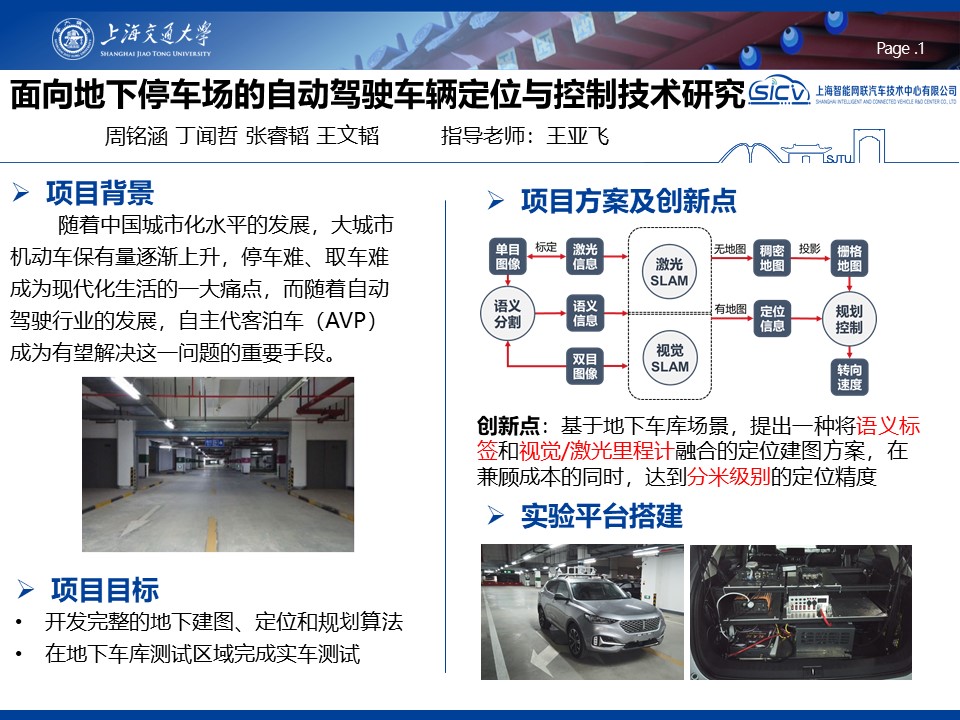
项目概述
随着时代的发展,汽车逐渐进入到每个家庭当中。在许多一线城市,汽车的数目更是只增不减,庞大的汽车数量使停车成为了一个费时费力的问题。
停车难、停车不规范并且易剐蹭都是泊车过程带来不便。地下停车场具有无卫星信号、场景简单、特征重复的特点,因此自动泊车的关键在于更精确的建图与定位。小组成员一方面用两种SLAM方法对场景进行建图与定位,另一方面引入语义分割提取出场景中每个物体的语义标签,在SLAM建图过程中进行优化并剔除动态物体,从而提高建图与定位精度。
项目目标
本项目的目标是建立一套完整的从多传感器感知到高精度建图及定位,最后规划并给出控制信号的地下车库泊车系统,实现在无GPS信号场景下的精准建图、定位及规划。
从细节上讲,即第一,能对原始的单目和双目图像处理出稳定的语义信息并传给SLAM系统;第二,激光SLAM与视觉SLAM分别利用语义信息,改进特征点提取、剔除动态物体与优化建图,将二维带语义的栅格地图传给规划控制系统;第三,利用地图中的可行驶区域语义标签、实时定位信息进行全局规划,在过程中使用局部规划进行避障及给出具体的方向盘转角与油门开度,最终使车辆行驶至目标车位附近。
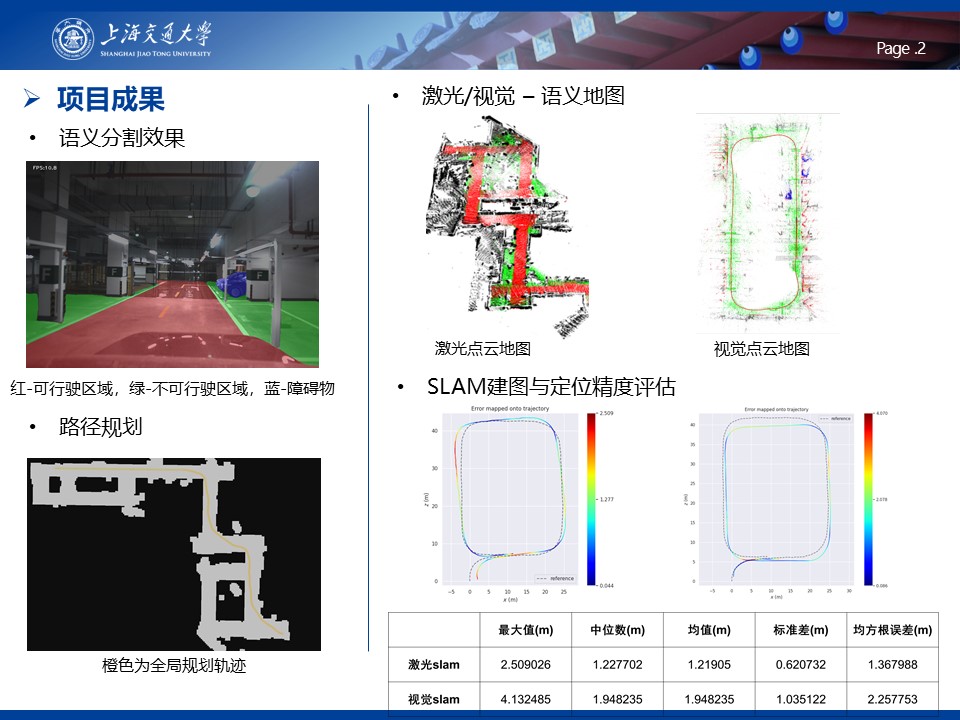
项目成果
语义分割部分通过采集数据,自行标注并建立训练集,训练DeepLabV3神经网络模型,完成对地下车库的语义分割和实时预测。
在激光里程计对地下车库实时建图过程中,可对于关键帧的特征点云投上语义,最终建出带有语义的全局地图,并投影成栅格地图, 实验结果表明,该激光SLAM系统的平均轨迹误差为1.2米。
本项目的视觉SLAM部分前端基于双目直接法完成对相机运动的直接估计,后端基于特征点法引入回环检测优化全局轨迹,同时建立特征点词带以实现重定位功能。实验结果表明,该视觉SLAM系统的平均轨迹误差为1.6米。
路径规划部分实现基于栅格地图的的轨迹规划和轨迹跟踪。




