

管片拼装机器人拟人化全自动拼装关键技术研究
“优秀设计”优胜奖资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
企业导师: 丁浩伦

指导教师: 陶建锋
项目成员: 杨心怡、朱玮晔、彭坦、刘敏
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
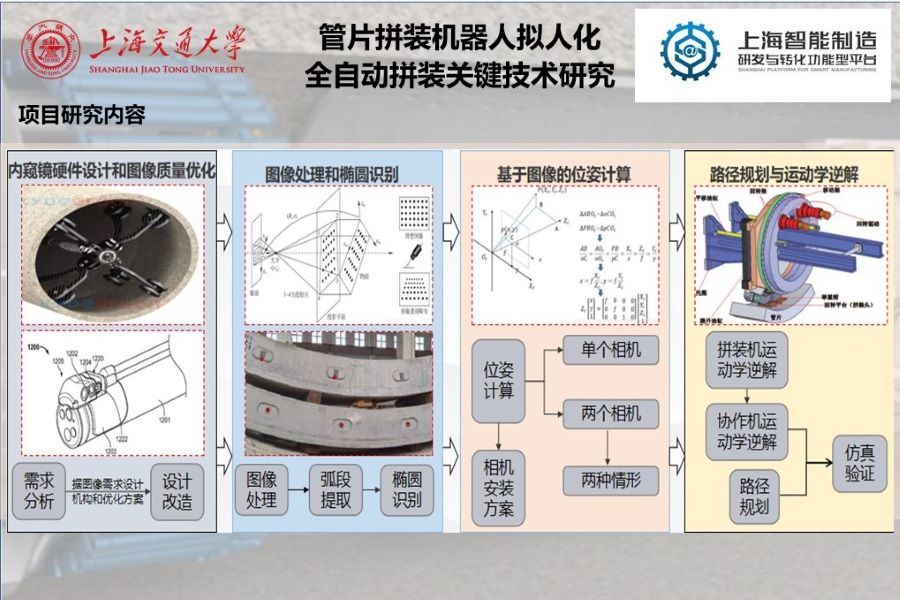
项目概述
本项目致力于实现盾构法隧道管片全自动无人化拼装。通过深入分析人工拼装过程,提取其中的核心环节,结合先进感知技术与计算机技术,开发出一套自动化拼装系统。项目首先全面分析现有管片拼装机器人的性能和人工拼装过程,明确必要的感知能力和控制技术。在现有拼装机硬件基础上,通过提升感知能力和改进控制算法,实现全自动无人化拼装。此技术路线具有较高的可行性和重要的理论与应用价值。
项目目标
项目主要目标包括制定全自动拼装方案、开发视觉感知终端样机、设计基于机械视觉的管片对准算法并完成实验验证。首先,利用相机及相关硬件搭建视觉感知终端样机;其次,运用视觉图像处理和优化算法,为基于视觉的待拼装管片螺栓孔对准提供软件支撑;然后,通过位姿计算算法求解待拼装管片相对已拼装管片的位姿信息;最后,利用这些位姿信息,规划拼装机的运动路径,通过六自由度协助机器人模拟常规管片拼装动作,验证相关技术的有效性。
项目成果




